
An diesem Projekt arbeite ich bereits seit ca. 10 Jahren, und vermutlich wird es auch nie fertig.
Das liegt unter anderem daran, dass man in viele Details unendlich viel Zeit investieren kann.
Und hat man eine bestimmte Sache fertig, steht auch schon eine bessere Idee auf dem Plan.
Ich möchte mein Projekt hier dennoch vorstellen, weil es nach meiner Ansicht ein paar interessante Details aufweist,
die von allgemeinem Interesse sein könnten.
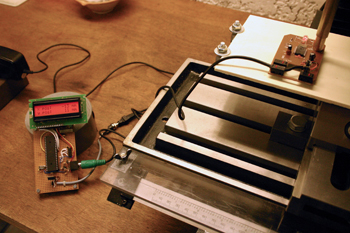
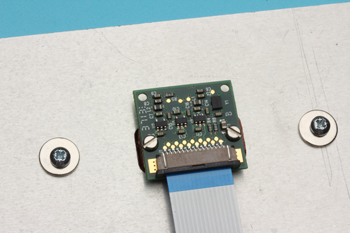
Alles hat mit der Idee angefangen, die zurückgelegte Wegstrecke mit den optischen Sensoren
aus Computermäusen zu messen. Hier sieht man einen Probeaufbau mit der
freigelegten Leiterplatte einer PS/2 Maus.
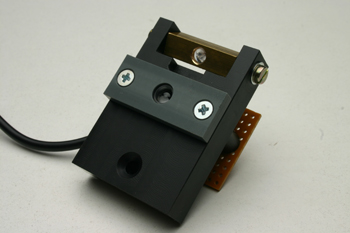
In diesem Bild sieht man einen ersten Prototyp, bei dem der Abstand zur bewegten Fläche
mit Hilfe einer eigenen Linse vergrößert wurde.
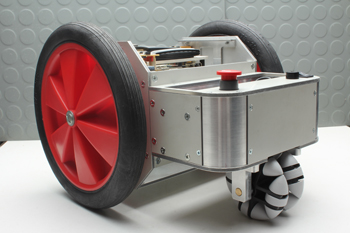
Bis der Roboter so aussah, ist allerdings noch viel Zeit vergangen.
Ich hatte damals noch keinen 3D-Drucker, was die mechanischen arbeiten entsprechend aufwändig machten.
In der Anfangsphase verwendete ich noch ein anderes Linux Evaluation Board.
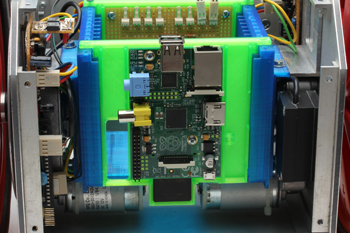
Hier sieht man bereits eine leistungsfähigere Elektronik mit einem Raspberry Pi als Controller.
Inzwischen konnte ich auch schon meinen 3D-Drucker einsetzen, um Halterungen anzufertigen.
Aus dem Raspberry Zubehör hat der Roboter nun auch eine Kamera für seine Vorderseite bekommen.
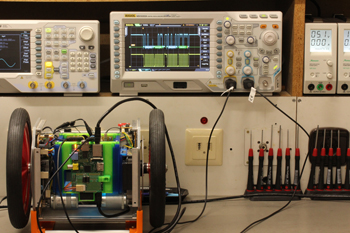
Die beiden Motor Boards enthalten je einen ATMega 32 Controller, der vom Raspberry über I2C angesteuert wird.
Das hat sich jedoch als Schwachstelle erwiesen, da der Raspberry kein clock-stretching unterstützt.
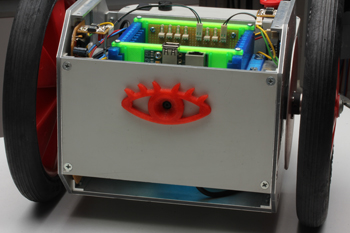
Diese Aufnahme zeigt den derzeitigen Zustand des Roboters, der allerdings auch schon wieder eine ganze
Weile unverändert geblieben ist.
Ich habe das folgende Video zusammengestellt, um die Browseroberfläche zu demonstrieren,
mit der sich der Roboter per PC oder Tablet fernsteuern lässt. Die Web GUI basiert auf Ajax,
wobei immer nur die notwendigsten Daten zwischen Roboter und PC übertragen werden.
Durch das selbst entwickelte Konzept reagiert die Benutzeroberfläche fast so schnell,
als würde es sich dabei um eine aktive Anwendung handeln.
Youtube Video
Das Video zeigt übrigens noch nicht den letzten Stand der Hardware. Der Interessent heißt Monty,
und ist noch nicht wirklich vom Nutzen dieses Projektes überzeugt.